

Reduce setup time by 70% and support costs by 50%.

Automate more tasks. Up to 60% higher throughput.

Empower software developers to build automation; 10x your talent pool.

Modular updates cut change effort by 50–60%, safely.

Evolve systems continuously without costly rewrites or disruption.
Juliet & Romeo® brings together principles that have never before been unified in one solution: expressiveness, real-time performance, modern software development, and ease of integration and control.
This unique combination is the key that unlocks the full value of robotics and industrial automation. Providing faster innovation, lower lifecycle costs, and scalable industrial systems.
Juliet & Romeo is distributed under a per-system runtime license and runs on most Linux-based systems.
Integrations are currently available for ctrlX and KE-Motion, with more platform support on the way.
Development tools are free via the Visual Studio Code Marketplace.
Being built for co-existence, Juliet & Romeo is not only offering strong values on its own; it also utilizes the automation community techniques and standards to unify and strengthen robotics and automation business cases even further.

The online course The Juliet Course for Motion Programming created in collaboration with Lund University, introduces the language Juliet and how it can be used to program physical motion.
The course covers both theoretical perspectives and explains how important aspects of programming robots are reflected in Juliet & Romeo.


Write motion, logic, AI, and fault handling in one readable, real-time language, built for faster development, smarter systems, and scalable automation.

Learn how Juliet&Romeo® combines the reliability of PLCs with the power and flexibility of python programming, for modern automation and robotics that scales.

Discover how Juliet&Romeo® brings modern software development practices to industrial automation—enabling faster commissioning, scalable automation systems, and a broader developer base
Juliet is the world's first generic robot programming language that enables safe real-time multitasking.
It is suitable for everything from motion coordination, process logic, sensor handling, configuration, user interfaces, and AI integration.
This allows developers to model, reuse, and evolve complex systems with clarity and control.
Romeo is a real-time virtual machine made for ensuring execution safety and responsiveness to application events.
Romeo includes automatic memory management and dynamic code editing. It provides the flexibility of interpreted languages while keeping the speed, predictability, and safety that a compiler brings.
The Romeo execution layer helps machine builders modernize legacy control logic and support advanced, evolving automation applications.

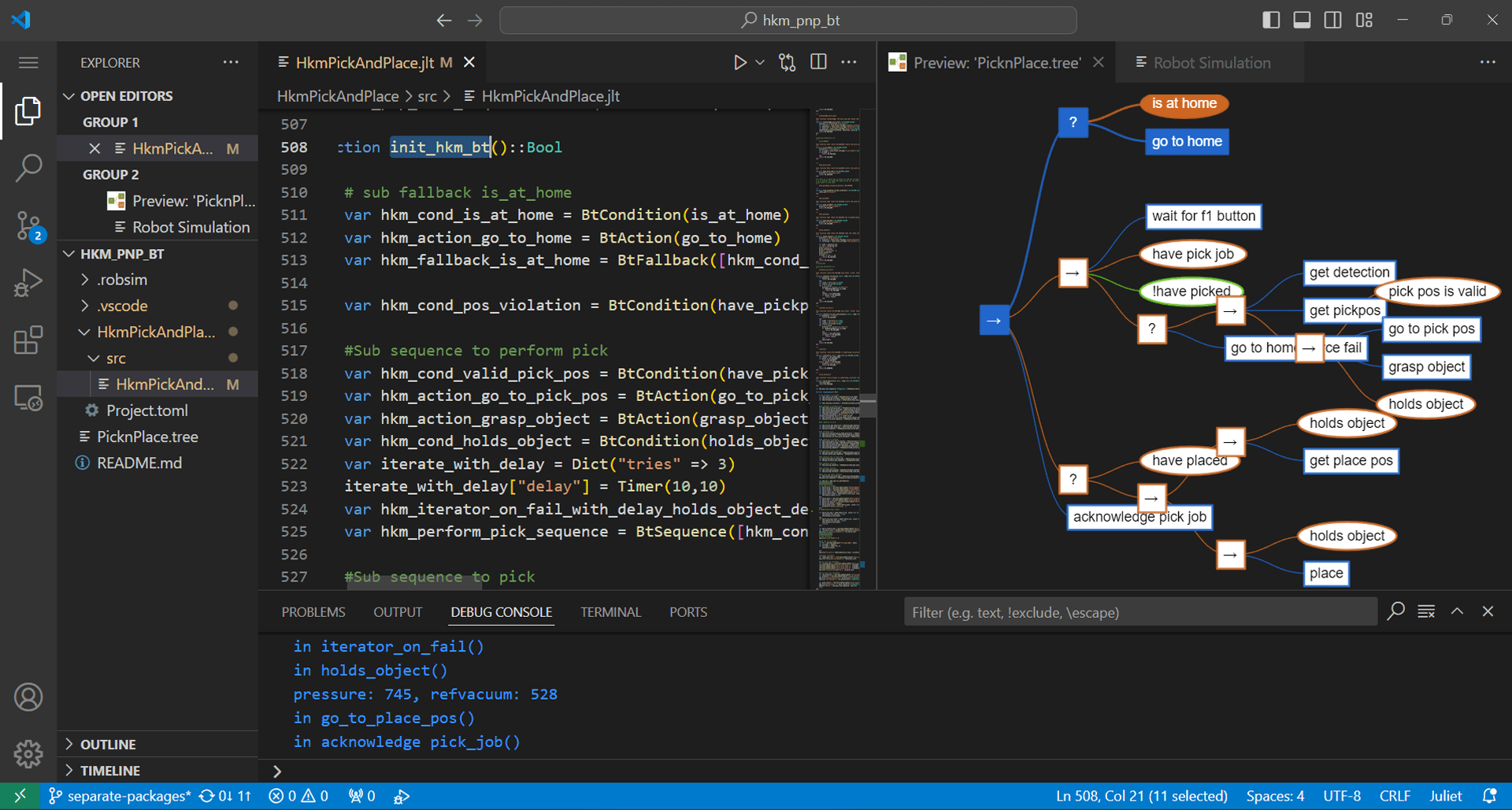
In this short video we introduce the Juliet programming language for motion control, walk through a live demo, and show how the compiler, REPL and real-time GC work together in production-grade robot systems.

